Мультипродуктові формули (MPF)
Версії пакетів
Код на цій сторінці розроблено з використанням наведених нижче залежностей. Рекомендуємо використовувати ці або новіші версії.
Мультипродуктові формули (MPF) дозволяють точніше моделювати динаміку квантової системи ціною з�більшення кількості виконань схем. Це техніка постобробки, яка зменшує похибку математичних сподівань для станів, еволюціонованих у часі.
Класичні обчислення використовуються для розв'язання системи лінійних рівнянь, що дає коефіцієнти для зваженої комбінації кількох виконань схем. Застосування такої зваженої комбінації може зменшити похибку при моделюванні часової еволюції за умови правильного вибору кроків Троттера. Інструмент MPF приймає набір даних — включно з кількістю кроків Троттера та порядком апроксимації Троттера — для підготовки та розв'язання (або наближеного розв'язання) відповідної системи лінійних рівнянь, яку потім можна використати для постобробки вимірювань математичного сподівання еволюціонованого у часі стану.
Встановлення пакету MPF
Існує два способи встановлення пакету MPF: через PyPI або зі збіркою з вихідного коду. Рекомендується виконувати встановлення у віртуальному середовищі, щоб забезпечити ізоляцію залежностей пакетів.
Встановлення через PyPI
Найпростіший спосіб встановити пакет qiskit-addon-mpf — через PyPI.
pip install qiskit-addon-mpf
Збірка з вихідного коду
Користувачі, які хочуть розробляти в репозиторії або встановити пакет вручну, можуть спочатку клонувати репозиторій:
git clone git@github.com:Qiskit/qiskit-addon-mpf.git
і встановити пакет через pip. Репозиторій також містить ряд необов'язкових залежностей, що вмикають певні функції.
Налаштуй параметри відповідно до своїх потреб.
pip install tox notebook -e '.[notebook-dependencies,dev]'
Теоретична основа
MPF можуть зменшити похибку апроксимації Троттера при моделюванні динаміки квантових систем завдяки зваженій комбінації кількох виконань схем. Ця зважена сума визначається як:
де — вагові коефіцієнти, — матриця густини, що відповідає чистому стану, отриманому еволюцією початкового стану за допомогою продуктової формули , яка апроксимує оператор часової еволюції з використанням кроків Троттера, а індексує кожну продуктову формулу, використану у сумі.
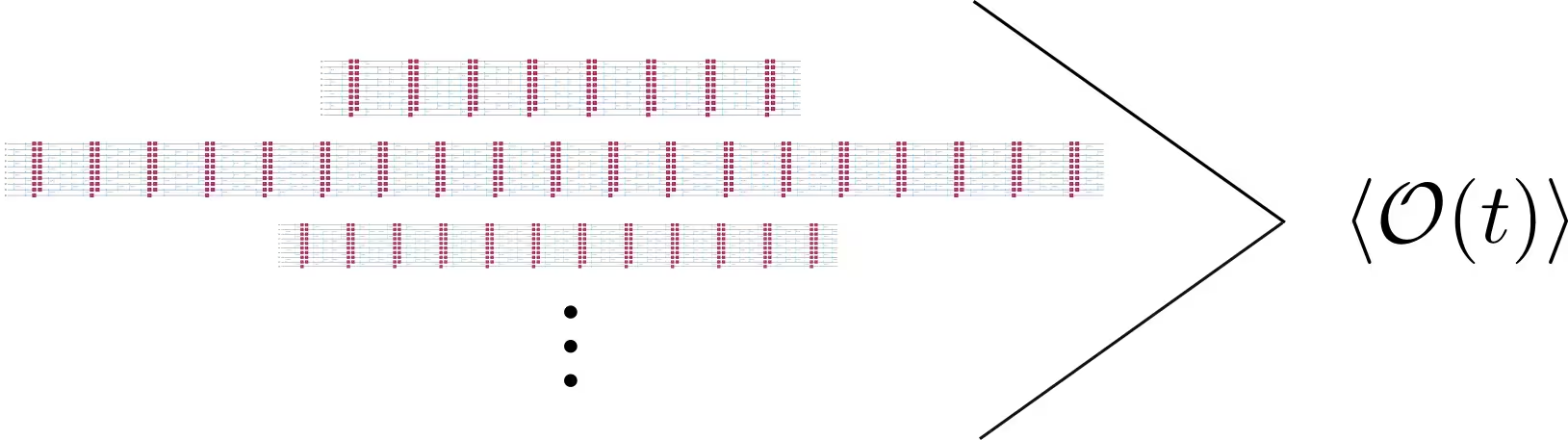
Зазвичай, однак, метою моделювання квантової динаміки є вимірювання деякого спостережуваного , яке є функцією часу. При використанні MPF виконуються кілька схем — кожна з кроками Троттера — для отримання кількох вимірювань цільового спостережуваного . Вимірювання цільового спостережуваного потім отримують обчисленням:
По суті, можна зменшити загальну похибку Троттера, апроксимуючи оператор часової еволюції кількома продуктовими формулами зі змінною кількістю кроків Троттера замість однієї продуктової формули. Для кожного члена зваженої суми будується схема, яка еволюціонує систему відповідно до кроків Троттера. Кожна схема виконується окремо на QPU для відновлення результатів на кроці постобробки. Корисність цієї техніки можна розглядати з двох точок зору:
- При фіксованій кількості кроків Троттера можна отримати результати з меншою сумарною похибкою Троттера.
- При кількості кроків Троттера, що призводить до глибоких схем, можна використовувати MPF для пошуку кількох схем меншої глибини, що дає схожу похибку апроксимації Троттера.
Визначення коефіцієнтів MPF
Основна функціональність пакету qiskit-addon-mpf полягає у визначенні коефіцієнтів MPF (які можуть залежати від часу). Процес отримання кожного передбачає розв'язання системи лінійних рівнянь , де — вектор коефіцієнтів, що підлягають визначенню, — матриця, яка залежить від кожного та використаної продуктової формули (тобто порядку апроксимації та кількості кроків Троттера), а — вектор обмежень. Цю систему рівнянь можна розв'язати або точно, або за допомогою наближеної моделі, яка мінімізує 1-норму коефіцієнтів. Крім того, вибір кожного є евристичним процесом, але може бути обмежений такими умовами:
- Найбільше значення обмежене максимальною глибиною схеми, яка може бути надійно виконана
- Найменше має задовольняти , оскільки саме тут похибка Троттера найкраще контролюється
- Жоден із коефіцієнтів не має бути близьким до , оскільки це означало б, що вони не роблять значного внеску в MPF
- Аналогічно, коефіцієнт, пов'язаний із найбільшим , не повинен домінувати, оскільки це означало б використання єдиної продуктової формули
- Нарешті, норма отриманих коефіцієнтів має бути малою, оскільки це свідчить про добре обумовлену MPF 1
Наступні кроки
- Прочитай сторінку про початок роботи з MPF.
Посилання
- A. Carrera Vazquez, D. J. Egger, D. Ochsner, and S. Wörner, "Well-conditioned multi-product formulas for hardware-friendly Hamiltonian simulation", Quantum 7, 1067 (2023).
- S. Zhuk, N. Robertson, and S. Bravyi, "Trotter error bounds and dynamic multi-product formulas for Hamiltonian simulation", Phys. Rev. Research 6, 033309 (2024).
- N. Robertson, et al. "Tensor Network enhanced Dynamic Multiproduct Formulas", arXiv:2407.17405v2 [quant-ph].