Урок починається з двох еквівалентних математичних описів вимірювань:
Загальні вимірювання можна описати наборами матриць — по одній на кожен результат вимірювання — у спосіб, що узагальнює опис проєктивних вимірювань.
Загальні вимірювання можна описати як канали, виходи яких завжди є класичними станами (представленими діагональними матрицями густини).
Ми обмежимося вимірюваннями з кінцевою кількістю можливих результатів.
Хоча вимірювання з нескінченно багатьма можливими результатами і можна визначити, вони значно рідше зустрічаються в контексті обчислень та обробки інформації, а для їх строгої формалізації потрібна додаткова математика (а саме теорія міри).
Спочатку ми зосередимось на так званих деструктивних вимірюваннях, де вихід вимірювання — це лише класичний результат вимірювання без будь-якої специфікації пост-вимірювального квантового стану виміряної системи.
Інтуїтивно можна уявити, що таке вимірювання знищує квантову систему або що систему відразу відкидають після вимірювання.
Далі в уроці ми розширимо погляд і розглянемо недеструктивні вимірювання, де є і класичний результат вимірювання, і пост-вимірювальний квантовий стан виміряної системи.
Припустимо, що X — система, яку потрібно виміряти, і для простоти вважаємо, що множина класичних станів X — це {0,…,n−1} для деякого натурального числа n, тому матриці густини, що представляють квантові стани X, є матрицями розміру n×n.
Нам насправді майже не доведеться посилатися на класичні стани X, але зручно буде посилатися на n — кількість класичних станів X.
Також припустимо, що можливі результати вимірювання — цілі числа 0,…,m−1 для деякого натурального числа m.
Зауважимо, що ці імена обрано лише для простоти; усе наступне без труднощів узагальнюється на довільні скінченні множини класичних станів і результатів вимірювання з іншими назвами.
Нагадаємо, що проєктивне вимірювання описується набором проєкційних матриць, сума яких дорівнює одиничній матриці.
Символічно,
{Π0,…,Πm−1}
описує проєктивне вимірювання X, якщо кожна Πa є проєкційною матрицею розміру n×n і виконується така умова:
Π0+⋯+Πm−1=IX
Коли таке вимірювання виконується над системою X у стані, описаному квантовим вектором стану ∣ψ⟩, кожен результат a отримується з імовірністю ∥Πa∣ψ⟩∥2.
Також пост-вимірювальний стан X отримується нормалізацією вектора Πa∣ψ⟩, але пост-вимірювальний стан ми поки що ігноруємо.
Якщо стан X описано матрицею густини ρ, а не квантовим вектором стану ∣ψ⟩, то імовірність отримати результат a можна виразити альтернативно як Tr(Πaρ).
Якщо ρ=∣ψ⟩⟨ψ∣ — чистий стан, то обидва вирази рівні:
Тут для другої рівності ми використовуємо циклічну властивість сліду, а для третьої — той факт, що кожна Πa є проєкційною матрицею і тому задовольняє Πa2=Πa.
Загалом, якщо ρ є опуклою комбінацією
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
чистих станів, то вираз Tr(Πaρ) збігається із середньою імовірністю результату a, оскільки цей вираз є лінійним відносно ρ.
Математичний опис загальних вимірювань отримується послабленням визначення проєктивних вимірювань.
Конкретно, ми дозволяємо матрицям у наборі, що описує вимірювання, бути довільними позитивно напіввизначеними матрицями, а не лише проєкціями.
(Проєкції завжди є позитивно напіввизначеними; їх також можна визначити як позитивно напіввизначені матриці, усі власні значення яких дорівнюють 0 або 1.)
Зокрема, загальне вимірювання системи X з результатами 0,…,m−1 задається набором позитивно напіввизначених матриць {P0,…,Pm−1}, рядки та стовпці яких відповідають класичним станам X і які задовольняють умову
P0+⋯+Pm−1=IX.
Якщо система X вимірюється у стані, описаному матрицею густини ρ, то кожен результат
a∈{0,…,m−1} з'являється з імовірністю Tr(Paρ).
Як ми природно й вимагаємо, вектор імовірностей результатів
(Tr(P0ρ),…,Tr(Pm−1ρ))
загального вимірювання завжди утворює вектор імовірностей для будь-якої матриці густини ρ.
Це підтверджують два таких спостереження.
Кожне значення Tr(Paρ) є невід'ємним, оскільки слід добутку будь-яких двох позитивно напіввизначених матриць завжди невід'ємний:
Q,R≥0⇒Tr(QR)≥0.
Один зі способів довести цей факт — скористатися спектральними розкладами Q і R разом із циклічною властивістю сліду, щоб виразити слід добутку QR як суму невід'ємних дійсних чисел, яка тому й є невід'ємною.
Умова P0+⋯+Pm−1=IX разом із лінійністю сліду гарантує, що суму імовірностей дорівнює 1.
Припустимо, що X — кубіт, і визначимо дві матриці таким чином.
P0=(32313131)P1=(31−31−3132)
Обидві матриці є позитивно напіввизначеними: вони ермітові, і в обох випадках власні значення рівні 1/2±5/6, які обидва додатні.
Також виконується P0+P1=I, тому {P0,P1} описує вимірювання.
Якщо стан X описаний матрицею густини ρ і ми виконуємо це вимірювання, то імовірність отримати результат 0 дорівнює Tr(P0ρ), а результат 1 —
Tr(P1ρ).
Наприклад, якщо ρ=∣+⟩⟨+∣, то імовірності двох результатів 0 і 1 такі:
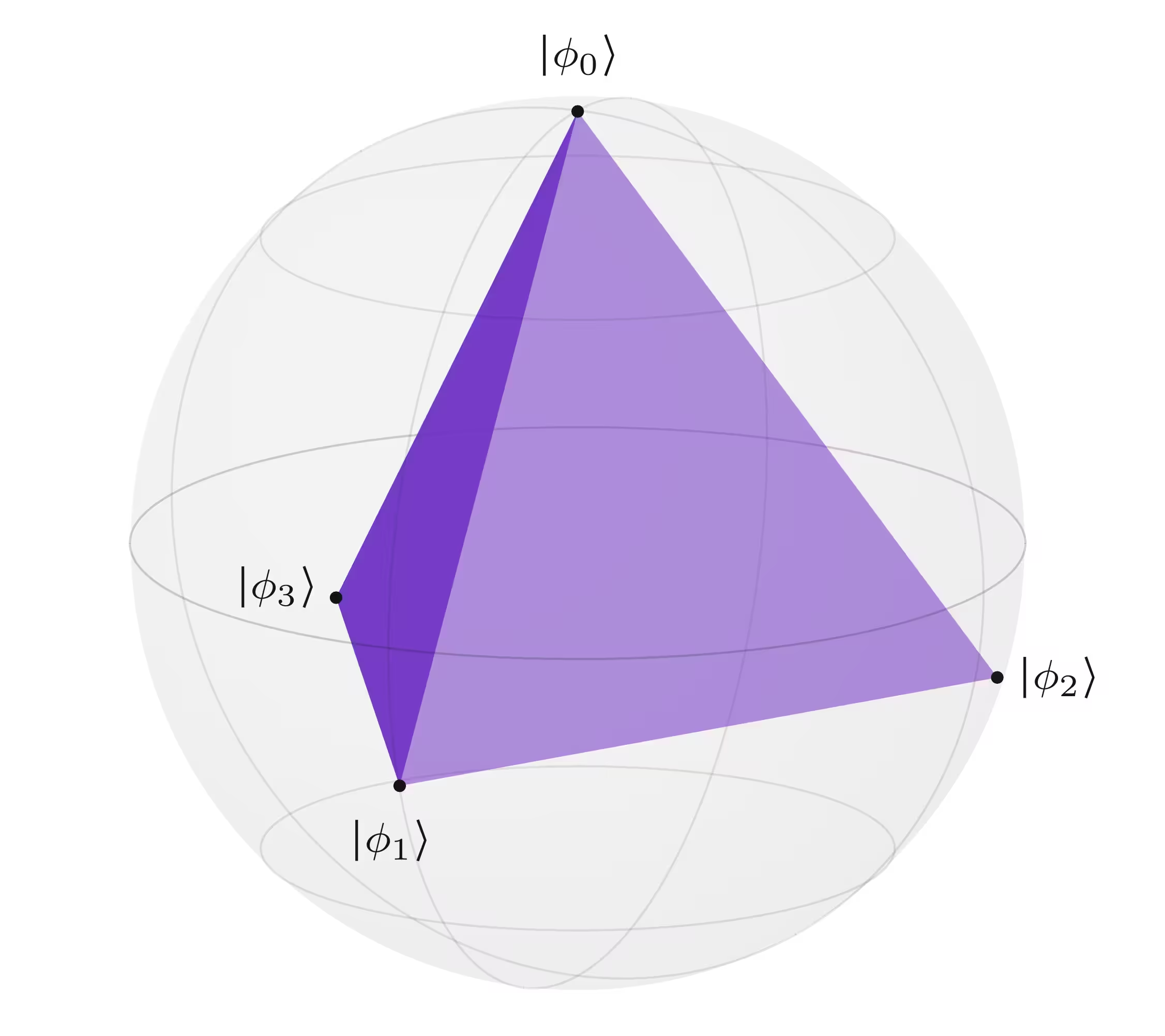
Ці чотири стани рівномірно розподілені по сфері Блоха: кожен знаходиться на однаковій відстані від трьох інших, а кути між будь-якою парою завжди однакові.
Тепер визначимо вимірювання {P0,P1,P2,P3} кубіта, поклавши Pa для кожного a=0,…,3 таким чином:
Pa=2∣ϕa⟩⟨ϕa∣
Переконаємось, що це дійсне вимірювання:
Кожна Pa очевидно позитивно напіввизначена — це чистий стан, поділений на одну другу.
Тобто кожна з них є ермітовою матрицею з одним власним значенням 1/2 і нулями у решті власних значень.
Сума цих матриць є одиничною матрицею: P0+P1+P2+P3=I.
Вирази цих матриць через лінійні комбінації матриць Паулі роблять перевірку цього простою.
Другий спосіб описати вимірювання в математичних термінах — це канали.
Класичну інформацію можна розглядати як окремий випадок квантової інформації, оскільки ймовірнісні стани можна ототожнити з діагональними матрицями густини.
Тому в операційному сенсі вимірювання можна розглядати як канали, входи яких — матриці, що описують стани вимірюваної системи, а виходи — діагональні матриці густини, що описують розподіл результатів вимірювання.
Незабаром ми побачимо, що будь-який канал із такою властивістю завжди можна записати в простій канонічній формі, яка безпосередньо пов'язана з описом вимірювань через набори позитивно напіввизначених матриць.
І навпаки, для будь-якого довільного вимірювання, заданого набором матриць, завжди існує коректний канал із діагональним виходом, який описує це вимірювання, як запропоновано в попередньому абзаці.
Зіставивши ці спостереження, ми доходимо висновку, що два описи загальних вимірювань є еквівалентними.
Перш ніж іти далі, уточнимо, що являє собою вимірювання, як ми розглядаємо його як канал і які припущення ми робимо.
Як і раніше, припустимо, що X — система, яку вимірюємо, а можливі результати вимірювання — цілі числа 0,…,m−1 для деякого натурального числа m.
Нехай Y — система, що зберігає результати вимірювання, тобто її множина класичних станів — {0,…,m−1}, і ми представляємо вимірювання як канал Φ з X у Y.
Наше припущення полягає в тому, що Y є класичною — тобто незалежно від початкового стану X отриманий стан Y представлений діагональною матрицею густини.
Математично умову, що вихід Φ завжди діагональний, можна виразити так.
Спочатку визначимо повністю дефазуючий канал Δm на Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Цей канал аналогічний повністю дефазуючому кубітному каналу Δ з попереднього уроку.
Як лінійне відображення, він обнуляє всі позадіагональні елементи вхідної матриці, залишаючи діагональ незмінною.
Простий спосіб виразити, що дана матриця густини σ є діагональною, — це рівняння
σ=Δm(σ).
Іншими словами, обнулення всіх позадіагональних елементів матриці густини не має ефекту тоді і тільки тоді, коли позадіагональні елементи від початку дорівнювали нулю.
Канал Φ задовольняє наше припущення — що Y є класичною — тоді і тільки тоді, коли
Φ(ρ)=Δm(Φ(ρ))
для кожної матриці густини ρ, що представляє стан X.
Отже, для тих самих матриць P0,…,Pm−1 канал Φ можна виразити так:
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Цей вираз узгоджується з нашим описом загальних вимірювань через матриці: кожен результат вимірювання з'являється з імовірністю Tr(Paρ).
Тепер переконаємось, що обидві властивості, які потрібні від набору матриць {P0,…,Pm−1} для опису загального вимірювання, дійсно виконуються.
Перша властивість — усі вони є позитивно напіввизначеними матрицями.
Один зі способів побачити це — зауважити, що для кожного вектора ∣ψ⟩, компоненти якого відповідають класичним станам X, маємо
Тепер перевіримо, що для будь-якої сукупності {P0,…,Pm−1} додатно напіввизначених матриць, що задовольняють умову P0+⋯+Pm−1=IX, відображення, визначене як
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
є коректним каналом з X у Y.
Один зі способів це зробити — обчислити представлення Чоя цього відображення.
Транспонування кожної Pa з'являється у третій рівності, оскільки
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Це дозволяє отримати вирази ∣b⟩⟨b∣ та ∣c⟩⟨c∣, які після підсумовування по b та c відповідно спрощуються до одиничної матриці.
З припущення, що P0,…,Pm−1 є додатно напіввизначеними, такими само є і P0T,…,Pm−1T.
Зокрема, транспонування ермітової матриці дає іншу ермітову матрицю, а власні значення довільної квадратної матриці та її транспонованої завжди збігаються.
З цього випливає, що J(Φ) є додатно напіввизначеною.
Виконуючи трасування по вихідній системі Y (тобто по правій системі), отримуємо
Припустимо, що маємо декілька систем, які разом перебувають у квантовому стані, і над однією з них виконується загальне вимірювання.
Це призводить до одного з результатів вимірювання, вибраного випадковим чином відповідно до ймовірностей, що визначаються вимірюванням та станом системи до нього.
Результуючий стан решти систем загалом залежатиме від того, який результат вимірювання було отримано.
Розглянемо, як це працює для пари систем (X,Z), коли вимірюється система X.
(Систему справа ми називаємо Z, бо Y залишимо для системи, що представлятиме класичний вихід вимірювання при його розгляді як каналу.)
Узагальнення на випадок, коли системи міняються місцями, а також на три чи більше систем не складає труднощів.
Припустимо, що стан (X,Z) до вимірювання описується матрицею густини ρ, яку можна записати так.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
У цьому виразі передбачається, що класичні стани X — це 0,…,n−1.
Вважатимемо, що вимірювання описується сукупністю матриць
{P0,…,Pm−1}.
Це вимірювання також можна описати як канал Φ з X у Y, де Y — нова система з множиною класичних станів {0,…,m−1}.
Зокрема, дія цього каналу виражається так.
Ми розглядаємо вимірювання системи X, тому ймовірності різних результатів вимірювання можуть залежати лише від ρX — редукованого стану X.
Зокрема, ймовірність кожного результату a∈{0,…,m−1} можна виразити трьома еквівалентними способами.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
Перший вираз природньо представляє ймовірність отримати результат a на основі вже відомого нам про вимірювання одиночної системи.
Другий вираз отримується просто за визначенням ρX=TrZ(ρ).
Для отримання третього виразу потрібно більше роздумів — читачам пропонується самостійно переконатися в його справедливості.
Підказка: еквівалентність між другим і третім виразами не залежить від того, чи є ρ матрицею густини і чи є кожна Pa додатно напіввизначеною. Спробуй спочатку довести це для тензорних добутків вигляду ρ=M⊗N, а потім скористатися лінійністю для загального випадку.
Хоча еквівалентність першого та третього виразів у попередньому рівнянні може бути не очевидною, вона має сенс.
Починаючи з вимірювання на X, ми фактично визначаємо вимірювання (X,Z), де ми просто відкидаємо Z і вимірюємо X.
Як і будь-яке вимірювання, це нове вимірювання можна описати сукупністю матриць, і не дивно, що воно описується сукупністю
Якщо ми хочемо визначити не лише ймовірності різних результатів, а й результуючий стан Z, зумовлений кожним результатом вимірювання, звернемося до каналового опису вимірювання.
Зокрема, розглянемо стан, який виникає, коли ми застосовуємо Φ до X і нічого не робимо з Z.
як ми бачили в уроці Матриці густини.
Для кожного результату вимірювання a∈{0,…,m−1} з ймовірністю
p(a)=Tr((Pa⊗IZ)ρ)
система Y перебуває у класичному стані ∣a⟩⟨a∣, а система Z — у стані
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Тобто, це матриця густини, яку ми отримуємо, нормуючи
TrX((Pa⊗IZ)ρ)
шляхом ділення на її слід.
(Строго кажучи, стан σa визначений лише тоді, коли ймовірність p(a) є ненульовою;
коли p(a)=0, цей стан не має значення, оскільки відповідна дискретна подія відбувається з нульовою ймовірністю.)
Звісно, ймовірності результатів узгоджуються з нашими попередніми спостереженнями.
Підсумуємо: ось що відбувається, коли над X виконується вимірювання {P0,…,Pm−1}, а (X,Z) перебуває у стані ρ.
Кожен результат a з'являється з ймовірністю p(a)=Tr((Pa⊗IZ)ρ).
За умови отримання результату a стан системи Z описується матрицею густини σa з рівняння (2), яку отримують нормуванням TrX((Pa⊗IZ)ρ).
Цей опис можна адаптувати до інших ситуацій — наприклад, коли порядок систем змінено на протилежний або коли систем три чи більше.
Концептуально це не складно, хоча запис формул може бути громіздким.
Загалом, якщо маємо r систем X1,…,Xr, стан складеної системи (X1,…,Xr) дорівнює ρ, і вимірювання {P0,…,Pm−1} виконується над Xk, відбувається наступне.
Кожен результат a з'являється з ймовірністю
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
За умови отримання результату a стан (X1,…,Xk−1,Xk+1,…,Xr) описується такою матрицею густини.